设为主页
加入收藏
繁體中文
网站首页
公司简介
产品展示
元宇宙测试系统
表面肌电传感器系统
柔性电子设备
薄膜弯曲传感器
电容式薄膜压力传感器
薄膜电位计
磁力传感器
薄膜温度传感器
产业动态
公司新闻
行业新闻
产品新闻
客户留言
企业展播
订单流程
诚聘精英
联系我们
运动测量系统
元宇宙测试系统
表面肌电量测系统
简易型压力分布量测系统
便携式压力量测系统
人体压力分佈量测系统
足部压力分布量测系统
握力压力分布量测系统
轮胎压力分布量测系统
雨刷力量分布量测系统
压力分布测试系统标定
表面肌电传感器系统
大脑工作室
人因工程
力学试验机
测力台
压力测量系统
步态分析系统
表面肌电测试系统
眼动仪
运动测量系统
动作捕捉系统
心里学实验室
无线传感器测试系统
柔性电子设备
薄膜弯曲传感器
电容式薄膜压力传感器
薄膜电位计
磁力传感器
薄膜温度传感器
温度传感器采集卡
薄膜铂电阻温度传感器
柔性NTC温度传感器
气体传感器
>苏州长显光电科技有限公司
>地址:江苏省常熟市常熟沿江经济开发区四海路11号常熟科创园407
>邮编:215500
>联系人:蔡小姐
>电话:0512-51910068
>传真:
>E-mail:changxian-el@hotmail.com
>> 网址:
www.fourtec.com.cn
你的位置:
首页
>>
产品展示
>>
表面肌电传感器系统
>>
运动测量系统
运动测量系统
基本CNN算法及典型触觉行为实验系统
来源:delsys表面肌电脑电分析系统_EMG_EEG_人因工程 | 发布时间:2020/2/21 15:12:28 | 浏览次数:
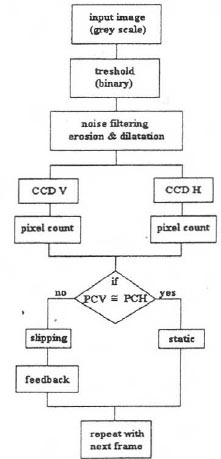
基本CNN算法及典型触觉行为实验系统 摘要 摘要-作为在硅上建立自适应触觉系统的第一步,我们利用阿拉丁亲细胞视觉微控制器开发系统,建立了一个具有市场上可用的压力传感器阵列触觉和类似CNN算法的实验系统。利用该系统,我们可以测量和存储触觉作用下压力场地形流的一些典型快照,并对这些快照进行评价。一组类似的CNN算法。 一。导言 在信息技术的感官革命中,我们所经历的时代,新的感知元素无处不在。感官输出值是连续的,在时间上可以是离散的或连续的。 在生活结构中,传感和“处理”部分紧密耦合,提供“智能传感”。我们打算建立一个原型系统,其中感官阵列输出由CNN-UM(细胞神经网络-通用机器)处理器处理[1-2]。CNN范式被成功地用于脊椎动物视觉系统的建模,特别是视网膜的建模(3-4)。到目前为止,这些类型的传感器处理器结构已经在光学传感器的情况下进行了研究,但在本实验中,我们打算使用压力传感器与CNN-UM。压力传感最常用的方法是电容式[5-6]、电阻式[7]和压电式[8]压力传感器。 尽管压力传感器阵列的不同实现方式的结果已经发布,但其中很少作为产品提供。我们选择了Tactilus?[9]建立一个简单的实验系统。触觉感知的过程是动态的,感觉阵列必须在空间中移动才能被感知。对于动态感知,处理系统必须处理相对大量的数据(触觉帧/秒)。 在这篇文章中,我们想记录一些典型触觉动作中压力场的快照,并通过CNN-UM对其进行预处理。 第一个实验是确定一个类似的算法,用于控制一只两只手指的机器人手握住一个易碎的物体,如玻璃或瓶子。目标是确定最小抓取力。系统对压力场的变化进行处理,感知物体从机器人手上滑出的时刻。根据这些信息,我们可以为抓取者提供更好的反馈。 第二个实验是确定给定swface的属性,如形状和大小,并在其上找到凹凸、孔洞和不同的纹理。 第二节介绍了实验系统。第三节对一些触觉过程进行了分析,在实验的基础上,第四节给出了一些结论。 2。触觉传感实验系统 这个实验系统由三个主要部分组成,如图1所示。 信号处理系统的主要部分是阿拉丁Pro[10]。该单元处理触觉图像流。在检测传感器阵列的某些运动过程中,特别是在检测物体从手指滑落的现象时,我们需要处理单元的快速响应,这是CNN·UM很好地完成的。当需要识别物体的大小、形状和纹理时,就需要类似的算法。 传感器阵列是Tactilus®触觉系统,通过USB端口连接到PC。 PC机仅用于显示事件,并在传感器部分和阿拉丁Pro之间建立连接。 图1:实验触觉系统 压力感应槽触觉器 Tactilus®是一种电子触觉力和压力指示传感器。我们之所以使用电容式压力传感器,是因为它们的压力灵敏度更高,并且比另外两种最常见的方法电阻式和压电式压力传感器更能抵抗工作温度的变化。传感器具有线性响应和低滞后。随着时间的推移,性能降低的可能性较小。 Tactilus®允许在事件发生时实时监控力在任何两个接触或配合表面之间的分散情况。压力场的可视化可以是:20、3D或直方图,结果也可以旋转。该系统包括一个50毫米x 50毫米的掌上传感器,空间分辨率为2.5毫米(21x 2 1个tuxels)和五个手指传感器,每个传感器为1.3毫米x 13毫米,空间分辨率为1.5毫米(9x9个tuxels)。一个luxel是传感器阵列中的一个传感器点。该系统的查询速率可达60000个传感器点/秒。传感器衬垫的最佳压力范围为0-1 atm,精度为±10%。 阵列的空间分布(例如安装在手套上)使得其结构类似于人类阵列的空间分布(例如,安装在手套上)使得类似于人手的配置成为可能,这使得我们能够研究躯体感觉的最重要形式,辨别性触摸(需要识别物体的大小、形状和纹理以及它们在皮肤表面的运动)[II]。 Aladdin-Pro系统为开发类似的CNN算法提供了一个通用框架。这些算法可以在软件模拟器或64*64 CNN-UM模拟VLSI芯片上运行[12]。ACE4k是一个包含CNN-UM芯片的平台,内置于PC I 04型板中。平台通过PCI总线接口连接到主机,为64*64 CNN-UM提供快速上下加载数据的能力。 三。几种典型触觉行为分析 温和的抓取 当抓取玻璃或瓶子等易碎物品时,必须了解何时接触,并尽量减小抓取力。触觉传感器可以为这项任务提供比通过视觉或力觉获得的更好的感官信息。该算法是检测用两只手指的机器人手握住物体所需的最小力。 图2:检测压力图之间差异的算法流程图 该算法持续跟踪接触区域的压力,并检测物体何时从手指中滑出。当物体被很好地抓住时和当它滑落时,压力图的thc形状之间的差异被有问题的算法识别出来。此差异表示所持对象开始滑动的时刻。同时还计算了事件的方向和速度。 此信息用于向抓取器提供适当的反馈。通常,该系统只能完成力和位置传感器难以完成的任务。 只有一个压力传感器(感应每个手指上的正常压力)无法完成Tbis任务。但是通过传感器阵列我们可以跟踪压力场的变化。这有助于我们更好地了解被抓物体的实际情况。 在图2中给出了算法的流程图。第一步是用阈值模板得到压力图的形状。利用腐蚀和膨胀形态学运算从噪声中滤除二值图像。地图的宽度和高度是通过应用一个水平CCO模板来测量的,该模板通过计算输出图像的像素和垂直方向的相同方式来测量。 图3:压力图:a)静压,b)阈值 图4:压力图:a)动态滑动图的快照,b)及其阈值形状 所有模板都可以从美国有线电视新闻网阿拉丁专业系统软件库。 利用压力图进行表面重建 当我们想要获得一些关于物体的纹理和形状的信息时,触觉信息的重要性是显而易见的。 当外科医生不能直接接触到病变部位而需要使用特殊的设备时,纹理传感识别是远程手术和微创手术的重要需求。 另一个不同的,但同样重要的任务是机器人在非结构化和不断变化的环境中识别物体形状的能力,特别是在视觉感知不够的情况下(在黑暗中,烟雾等)。 由于触觉感知的神经生理学,当我们将尖端移过物体表面时,我们能比静态触摸更好地感知纹理。其主要原因是我们尖端的机械感受器适应了静态刺激。 这个实验是为了确定一个给定的表面的性质,例如形状和大小,并在上面找到凸起、洞和不同的纹理。 传感器阵列安装在一个在20内移动的执行器上。对于每个触觉框架,系统都知道感官阵列的X-Y坐标。图像是交错的,经过预处理后,它们形成最终的表面图像。 图5:拐角处的压力图 图6:重建过程 该算法加入了压力图给出的角点。物体的表面是通过填充角和边之间的空间来获得的。 图7:曲面重建算法 这种自传的CNN算法可以帮助理解盲人如何在他们的想象中重建环境。 四。结论 利用Xsensor系统和Aladdin Pro,结合64x64 CNN-UM芯片,建立了一个自适应触觉传感过程的实验系统。开发并测试了类似的CNN算法。压力传感过程的时间要求高于芯片上运行的模拟CNN算法的总时间要求。传感器阵列以16帧/秒的速度扫描。模拟式aJgoritm的平均运行时间约为21ms,机器人手的执行器可以由ana的结果驱动触觉感知提供了一组丰富的操作过程信息,触觉感知研究的未探索领域众多。在触觉感知的研究中,下一步是展示视觉和触觉之间更紧密的耦合。 致谢 该项目得到了“匈牙利国家研究与发展方案:TeleSense NKF 2001/02/035”的支持。授予OTKATS40858(匈牙利国家研究基金)。 参考文献 五十、 O.Chua,L.Yang,“细胞神经网络:理论”,《电路与系统的IEEE交易》,第35卷,第1257-1272页,1988年 T、 Roska,L.O.Chua,“CNN通用机器-模拟空气~计算机”,在IEEE Trans。论电路与系统Ⅱ:模拟与数字信号处理第40卷,第3期,第163-1731993页 D、 Batya,B.Raska,T.Roska,F.Werblin,“CNN的框架。:哺乳动物视网膜中的并行处理建模“《Ciroit理论与应用国际期刊》,第30卷,第363-3932002页 M、 布伦德尔。T、 Roska,“使用自适应细胞神经网络的自适应图像传感和增强。《通用机械》,国际Cimit理论与应用杂志。第30卷,第287-3122002页 压力剖面系统。电容传感,洛杉矶,2002,www.pressure-profile.com 压力剖面系统,TactArray。洛杉矶,2002年,www.pressure-profile.com B、 J.凯恩,M.R.卡特科斯基。G、 T.A.Kovacs,“用于高分辨率机器人触觉成像的牵引应力传感器阵列”,《微型机电系统杂志》,第9卷,第4期,第425-434页,2000年 印刷电路板压电子学,一般压电理论和压电压力传感器简介,1999年 传感器产品,XSENSOR实时触觉压力测量,东汉诺威,2002,www.xsenSOLcom 阿拉丁Pro系统,模拟计算机,2002,www.Analogic-Computers.com E、 R.Kandel,J.H.Schwartz和T.M.Jessell:《神经科学原理》。出版人:McGrawHill/Appleton&Lange;第四版(2000年1月5日) S、 Espejo,R.Dominguez Castro,G.Linan,A.Rodriguez Vazquez,“带模拟和数字110的64x64 CNN通用芯片”,第五届IEEE电子、电路和系统国际会议论文集(lCECS'98)。第203-206页,里斯本,1998年 M-H.Bao,“微型机械传感器、压力传感器、加速计和陀螺仪”,《传感器和执行器手册》第8卷,Elsevier Science B.V.,2000年 K、 Suzuki,K.Najafi,K.D.Wise,“1024元件高性能硅触觉成像仪”,《电子器件的IEEE交易》,第37卷,第8期,第1852-1860页,1990年 G、 T.A.Kovacs:微机械传感器Sourceboak,McGraw-Hill,1998年 K、 S.J.Pister,“微机电系统设计与制造简介”,伯克利大学传感器与执行器中心,伯克利分校,2002年 W、 P.Eaton,J.H.Smith,D.J.Monk,G.O'Brien和T.F.Miller,“块状表面微机械压力传感器的比较”,微机械设备和部件,Proc SPlE,Vo13514,P.4311998
TAG:
打印本页
||
关闭窗口
上一篇:
消防员背教项目的成本效益
下一篇:
选择步态分析系统时要考虑的7件事